以下の手順でご対応お願い致します。
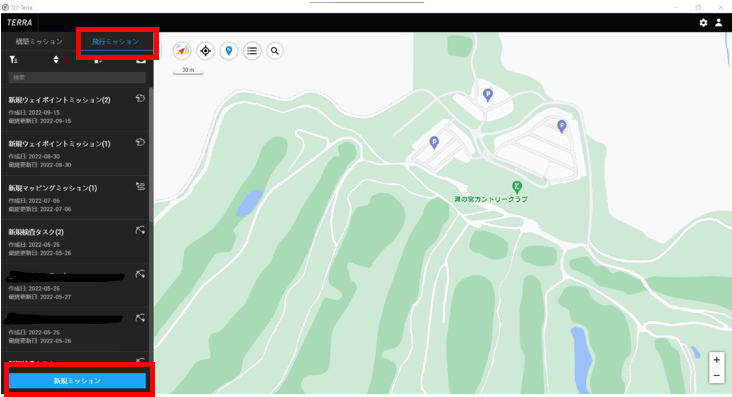
「飛行ミッション」をクリックして「新規ミッション」をクリックします。?
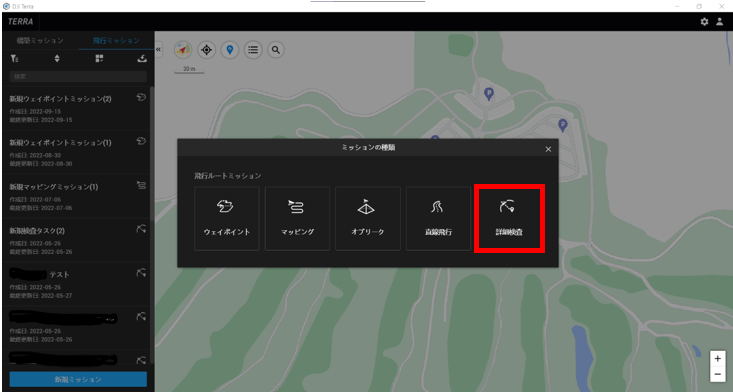
作成するミッションの種類が出てくるので「詳細検査」をクリックします。?
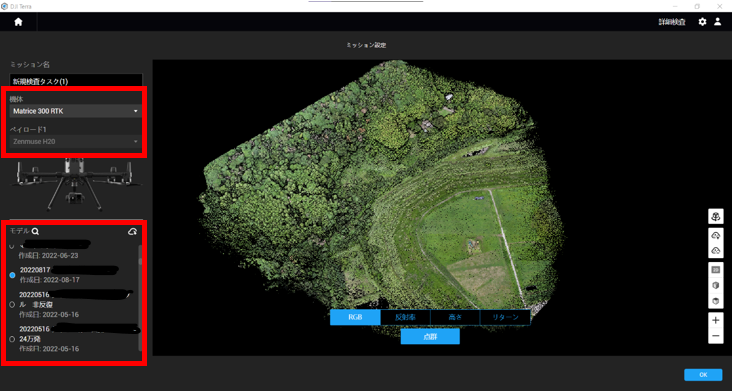
ミッション名を任意で設定します。?
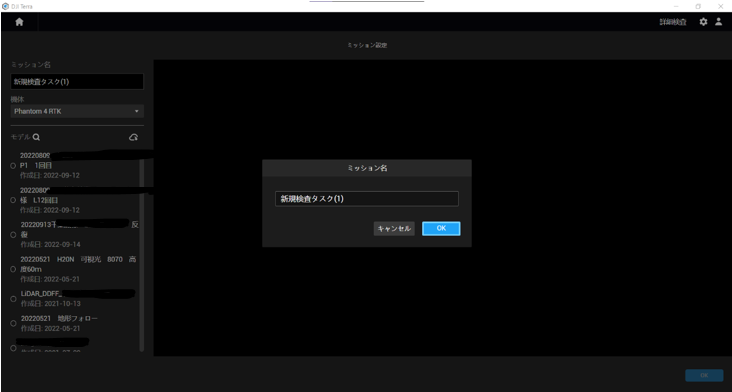
機体を選択し、ペイロードも選択します。
※M300RTKの場合はH20シリーズのみ選択可能です。
その後今からルートを作成するモデルを選択します。
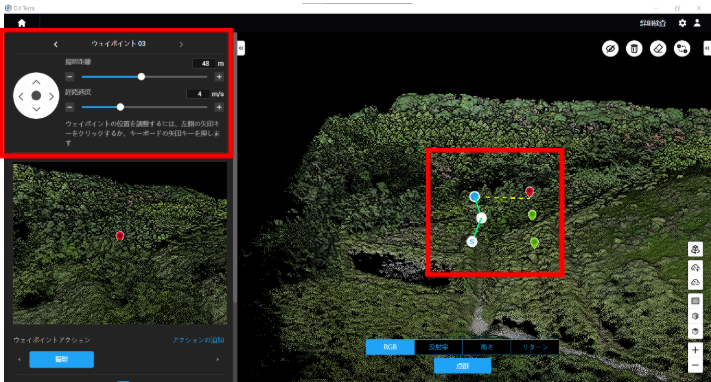
モデルを選択した後はウェイポイントと同じように、モデル上に飛行ルートをタップしていきます。はペイロードカメラでの撮影個所を指します。どこを撮影するのかをマウスで動かすことが可能です。その後左上にある撮影距離や経路速度を、ウェイポイントごとに設定することが可能です。
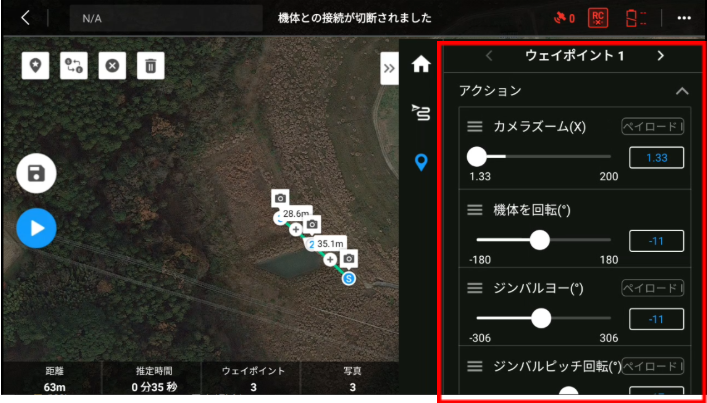
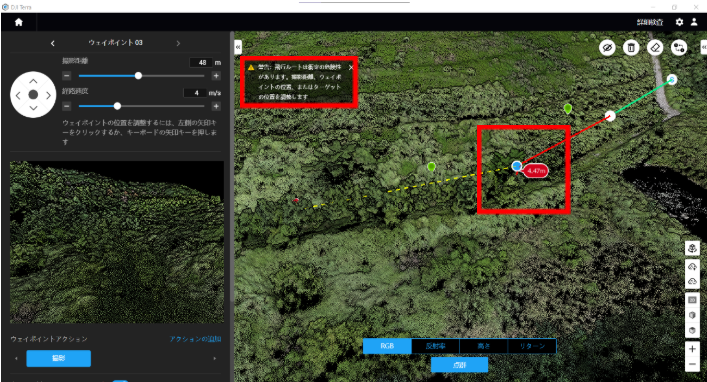
撮影距離を設定していると下記の赤枠のように赤字で距離が出てくることがあります。
これはドローンの機体と障害物の距離が近すぎて、警告が出ている状態です。
大変危険な為ウェイポイント位置の調整や、撮影個所の見直しをお願い致します。
※この距離はこの後に設定する「安全距離」で変更することが出来ます。
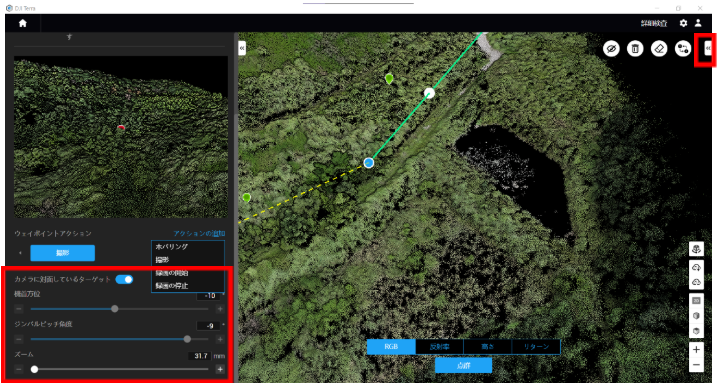
次に左下部にある設定の説明を致します。ウェイポイントアクションではそのウェイポイントに到達したときに、ドローンがどのような挙動をとるのかを設定できます。
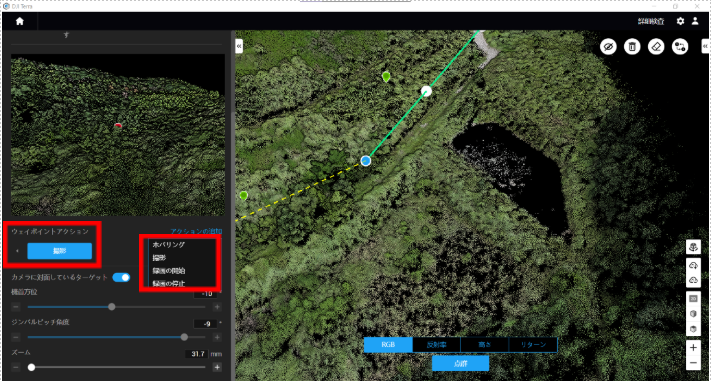
「カメラに対面しているターゲット」をOFFにすると、機種方位やジンバルピッチ角度、ズーム倍率などを任意で変更することが可能です。
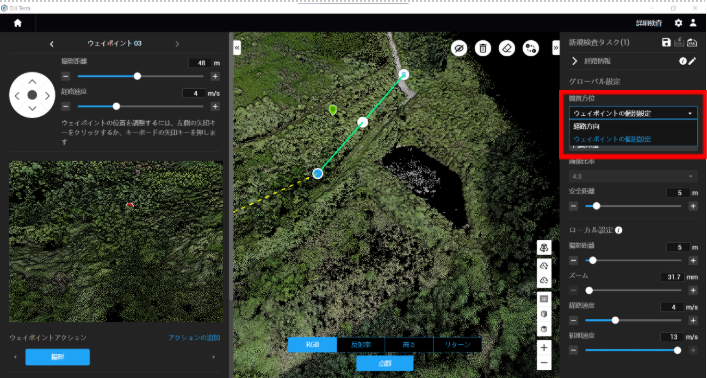
ここまで設定出来れば右上部の〈〈 を選択します。
機種のカメラ方位を選択します。
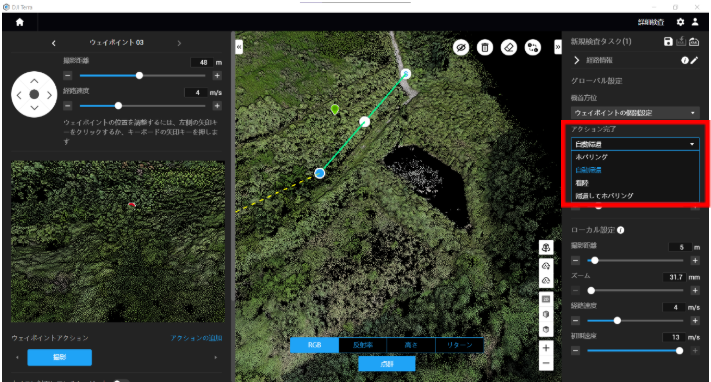
アクション完了時の挙動選択が出来ます。
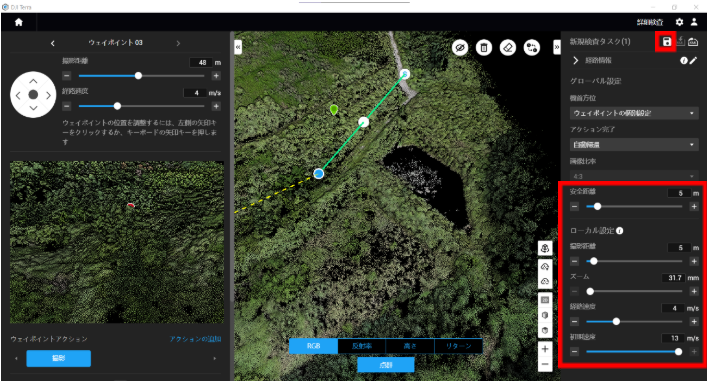
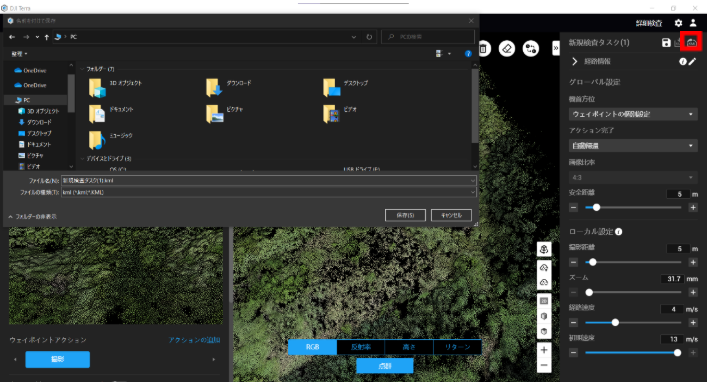
飛行時の各種設定を行います。ここまで設定出来たら右上のフロッピーディスクのボタンをクリックし、詳細点検ミッションを保存します。
KMLボタンをクリックすると、このミッションをKMLファイルにて出力する事が出来ます。PCの保存先を選んで保存をクリックします。KMLファイルが出力出来たらmicroSDカードにデータを移行(もしくはコピー)します。
送信機にデータを移行(もしくはコピー)したmicroSDカードを差して、送信機の電源を点けます。その後TOP画面で「飛行ルート」を選択します。

自動航行ルートのライブラリーに移った後、「KMZインポート」をクリックします。

先程のデータをSDカードに入れたので「external_sd」を選択します。
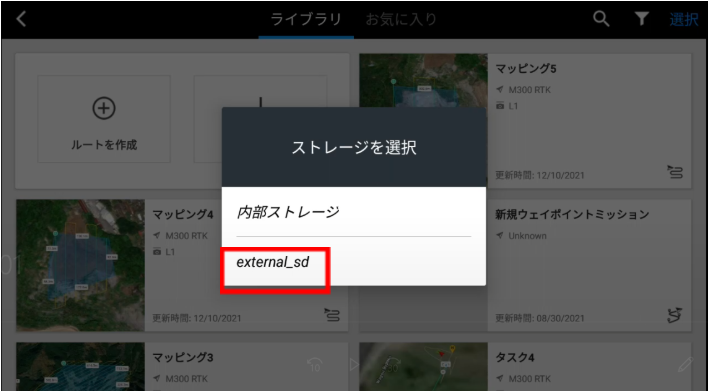
先程入れたKMLファイルをタップします。

新規検査タスクがコピーされます。

タスクの中を確認すると2Dマップ上ですが飛行ルートが確認でき、ウェイポイントごとのアクション設定がされているのも確認できます。